/https://www.webnews.it/app/uploads/2014/12/self.jpg "L'occhio delle self-driving car sul mondo")
Una visione geometrica del mondo. Così Chris Urmson, numero uno del team di Google al lavoro sulla vettura a guida autonoma, definisce il modo in cui il mezzo osserva ciò che lo circonda. Il progetto è entrato da qualche settimana nella sua fase clou, con il debutto dei veicoli nel traffico cittadino della California. È l’ennesimo step evolutivo di un percorso intrapreso ormai diversi anni fa con la realizzazione dei primi prototipi.
Dal palco della conferenza TED, Urmson ha iniziato il suo intervento con qualche dato allarmante relativo agli incidenti, causa di mortalità per migliaia di persone solo negli Stati Uniti ogni anno. Il principale responsabile è nella quasi totalità dei casi l’uomo: distrazioni o comportamenti poco responsabili al volante possono provocare tragedie. Eliminando il fattore umano e affidando la gestione delle quattro ruote alla tecnologia, secondo bigG (e le molte altre aziende impegnate in progetti simili), un giorno sarà possibile rendere più sicura la viabilità, con grandi benefici per tutti. Se il rischio che si verifichino incidenti non potrà mai essere del tutto scongiurato, ridurne al minimo il numero è la priorità delle self-driving car.
Il sistema di sensori e videocamere presente a bordo monitora costantemente la strada, in tempo reale, identificando non solo gli altri veicoli che sopraggiungono, ma anche l’eventuale presenza di animali, pedoni o ciclisti. Anche nel caso in cui questi ultimi non rispettino una precedenza o abbiano un atteggiamento non proprio in linea con quanto previsto dal codice stradale. Il software di bordo, poi, riceve queste informazioni come input e immediatamente agisce su sterzo, acceleratore e freno, per guidare la vettura.
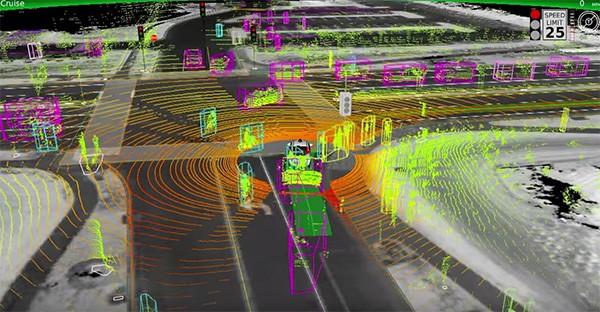
Come la vettura di Google a guida autonoma interpreta un incrocio stradale in cui ci sono altri mezzi e pedoni
Un approccio simile a quello adottato dal team tutto italiano VisLab, con il prototipo DEEVA che abbiamo avuto modo di osservare da vicino lo scorso anno.
/https://www.webnews.it/app/uploads/2025/04/wp_drafter_1213570.jpg)
/https://www.webnews.it/app/uploads/2025/04/wp_drafter_1213427.jpg)
/https://www.webnews.it/app/uploads/2025/04/wp_drafter_1212961.jpg)
/https://www.webnews.it/app/uploads/2025/04/wp_drafter_1212795.jpg)